Defining the \(L^2\) Space of \(k\)-Forms on Riemannian Manifolds
ABSTRACT In order to define the Laplacian on Riemannian manifold \((M,g)\), one needs to define the space it acts on (or at least a dense subset). This post defines the Riemannian volume form, and the \(L^2\) space of functions (and more general \(k\)-forms) on Riemannian manifolds. This will allow for the development of the Laplacian operator in this more general setting in later posts.
Setting. Let \((M, g)\) be a Riemannian manifold of dimension \(n\) with metric tensor \(g\). The metric induces an inner product on the tangent space \(T_{x}M\) at each point \(x \in M\), denoted by \(g(v,w)\) for vectors \(v,w \in T_{x}M\).
In the Euclidean case, the Laplacian operator \(\Delta\) is defined on function \(f \in L^{2}(\mathbb{R}^{n})\) by the operation
\[\Delta f = - \sum_{i=1}^{n} \frac{\partial^{2} f}{\partial x_{i}^{2}} .\]
To generalize this to Riemannian manifolds, we first need to define the corresponding \(L^{2}\) space for functions and more generally for \(k\)-forms.
Definition 1. Let \((M, g)\) be a Riemannian manifold of dimension \(n\). The \(L^{2}\) space of functions on \(M\) is defined as the completion of \(C_{c}^{\infty}(M)\) (the space of smooth functions with compact support) with respect to the inner product
\[\langle f_{1}, f_{2} \rangle = \int_{M} f_{1}(x) f_{2}(x) \, dV_{g}(x),\]
where \(dV_{g}\) is the Riemannian volume form induced by the metric \(g\).
Functions are \(0\)-forms. We can more generally consider \(k\)-forms on \(\mathcal{M}\). By the use of the musical isomorphism, we can recover an \(L^{2}\) structure on this space induced by the metric tensor \(g\).
Definition 2. Let \((M, g)\) be a Riemannian manifold of dimension \(n\). The \(L^{2}\) space of \(k\)-forms on \(M\) is defined as the completion of \(C_{c}^{\infty}(M, \Lambda^{k}T^{*}M)\) (the space of smooth \(k\)-forms with compact support) with respect to the inner product
\[\langle \omega, \eta \rangle = \int_{M} g(\omega(x), \eta(x)) \, dV_{g}(x),\]
where \(g(\omega, \eta)\) is the inner product on the space of \(k\)-forms (with abuse of notation) induced by the metric \(g\).
Intuition. The inner product on \(0\)-forms globalize the pointwise overlap (their product) of functions by integrating against the Riemannian volume form. This aggregates the pointwise overlap over the entire manifold. This is the same idea as the \(L^{2}\) space of functions on Euclidean space where implicitly we use the standard Euclidean volume form.
More generally, for \(k\)-forms, the pointwise inner product \(g(\omega, \eta)\) measures how much the two \(k\)-forms overlap at each point, and integrating this against the Riemannian volume form aggregates this overlap over the entire manifold. The generalizes the same underlying idea: the angle between globally defined objects (functions or \(k\)-forms) is measured by aggregating their pointwise overlap across the manifold.
The discussion that follows draws heavily from (Rosenberg 1997; Tu 2011).
Volume Forms
The Riemannian volume measure is defined by the following.
Definition 3. Let \((M, g)\) be a Riemannian manifold of dimension \(n\). The Riemannian volume form \(dV_{g}\) is defined as
\[dV_{g} = \sqrt{| \det(g) |} \, dx^{1} \wedge dx^{2} \wedge \cdots \wedge dx^{n},\]
where \(g\) is the matrix where \(g_{ij}\) are the components of the metric tensor in local coordinates \((\partial_{x^{1}}, \partial_{x^{2}}, \ldots, \partial_{x^{n}})\) where positively oriented basis of \(T_{x}M\).
Under this formula, the volume of \((M,g)\) is given by
\[\operatorname{Vol}(M) = \int_{M} dV_{g}(x).\]
(Heuristic) Derivation
To see where this formula comes from, we consider recovering the volume of a set \(U \subset M\) by summing up volumes of infinitessimal boxes within the tangent spaces \(T_{x}M\) for \(x \in U\). This recovers the familiar idea for the Euclidean setting, where the volume of a set \(U \subset \mathbb{R}^{n}\) is given by summing up volumes of infinitessimal boxes aligned with the standard basis vectors.
We have the following picture in mind:
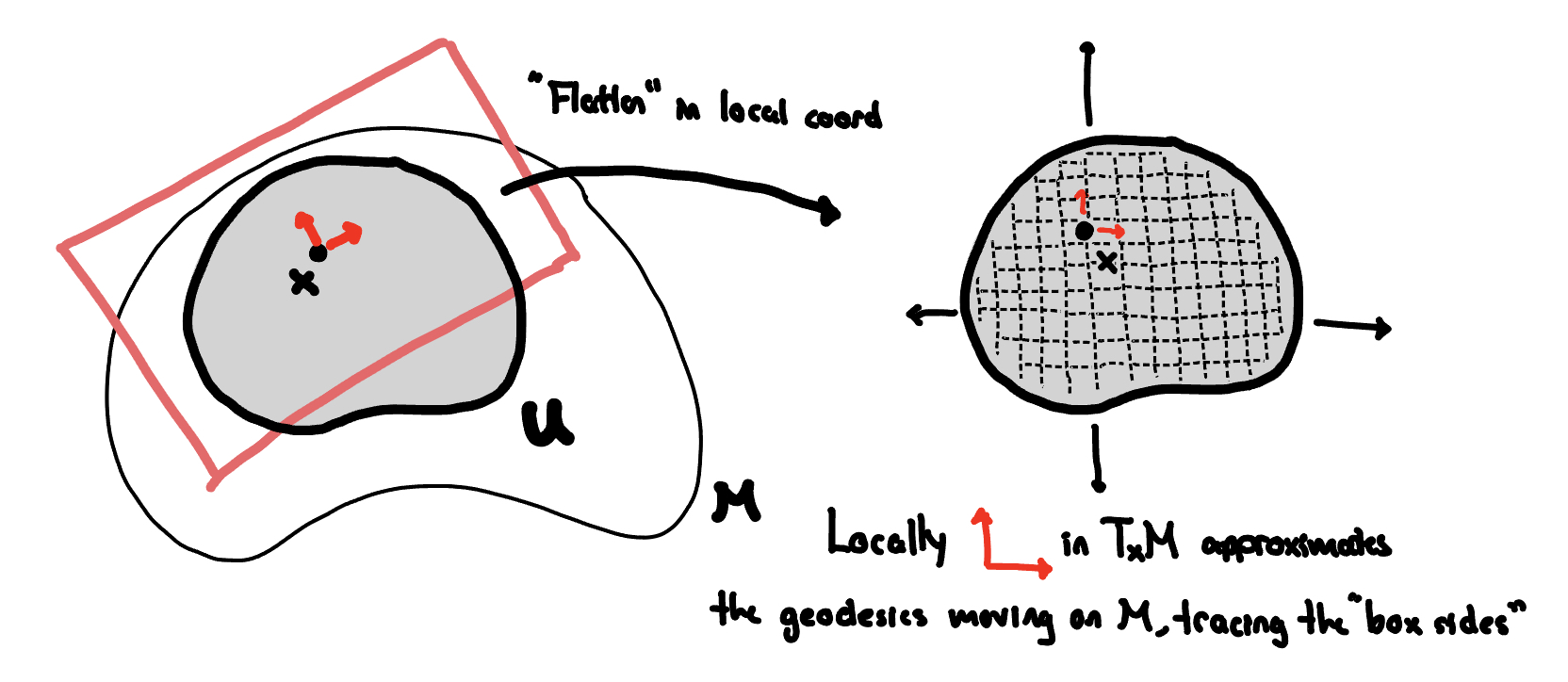
More concretely, consider a positively oriented coordinate neighborhood \(U \subset M\) around \(x\) with coordinates \((x^{1}, x^{2}, \ldots, x^{n})\). Then pick a large number of points \(\{p_{j}\}_{j=1}^{N}\) in \(U\). For each point \(p_{j}\), define the infinitessimal box \(B_{j} \subset T_{p_{j}}M\) with sides \((\Delta x^{1})\partial_{x^{1}}, (\Delta x^{2}) \partial_{x^{2}}, \ldots, (\Delta x^{n}) \partial_{x^{n}}\) where \(\Delta x^{i}\) are small increments on the \(i\)-th local coordinate direction \(\partial_{x^{i}} = \frac{\partial}{\partial x^{i}}\). For each tangent space \(T_{p_{j}}M\), let \(v_1, v_2, \ldots, v_n\) be the positively oriented orthonormal basis. Then, under Einstein summation notation, we can write
\[\partial_{x^{i}} = \alpha_{i}^{k} v_{k},\]
for some matrix \(\alpha^{k}_{i}\). Note that by convention, this means \(\alpha_{i}^{k} v_{k} \equiv \sum_{k=1}^{n} \alpha_{i}^{k} v_{k}\).
We expect the volume to be
\[\begin{aligned} \operatorname{Vol}(U) & = \lim_{\Delta x^{i} \to 0} \lim_{N \to \infty} \sum_{j=1}^{N} \operatorname{Vol}(B_{j}) \\ & = \lim_{\Delta x^{i} \to 0} \lim_{N \to \infty} \sum_{j=1}^{N} \text{Volume of Parallelepiped with $i$th Side } (\Delta {x^{i}}) \sum_{k=1}^{n} \alpha_{i}^{k}v_{k}\\ & = \lim_{\Delta x^{i} \to 0} \lim_{N \to \infty} \sum_{j=1}^{N} \left( \prod_{i=1}^{n} \Delta x^{i} \right) \left| \det(\alpha_{i}^{k}) \right| \\ & = \int_{U} \left| \det(\alpha_{i}^{k}) \right| dx^{1} \wedge dx^{2} \wedge \cdots \wedge dx^{n} \end{aligned}\]
where \(\det(\alpha)\) is the absolute value of the determinant of the matrix with entries \(\alpha_{i}^{k}\). Note that in the second line we do not use the summation convention for \(i\).
By definition of the metric tensor \(g\), we have that
\[ g_{ij} = g(\partial_{x^{i}}, \partial_{x^{j}}) = g(\alpha_{i}^{k} v_{k}, \alpha_{j}^{\ell} v_{\ell}) = \alpha_{i}^{k} \alpha_{j}^{\ell} g(v_{k}, v_{\ell}) = \alpha_{i}^{k} \alpha_{j}^{\ell} \delta_{k \ell} = \alpha_{i}^{k} \alpha_{j}^{k} = (AA^{T})_{ij}, \]
where \(A = (\alpha_{i}^{j})\). Thus, it follows that
\[\det(g) = \det(AA^{T}) = \det(A)^{2},\]
and so we have that the volume form of \(U\) should be given by
\[ \operatorname{Vol}(U) = \int_{U} \sqrt{|\det(g)|} \, dx^{1} \wedge dx^{2} \wedge \cdots \wedge dx^{n}. \]
This derivation is heuristic, but it provides the intuition for why the Riemannian volume form takes the form it does.
Exercise. Verify that the volume form is a well-defined \(n\)-form on \(M\); that is, it does not depend on the choice of the positively oriented coordinate chart.
\(L^{2}\) Spaces on Riemannian Manifolds
With the Riemannian volume form defined, we can now define the desired \(L^{2}\) spaces. The first definition for functions is natural, as it generalizes the Euclidean \(L^{2}\) space by replacing the standard volume form with the Riemannian volume form. The second definition for \(k\)-forms uses the inner product on \(k\)-forms induced by the metric tensor \(g\).
The rest of this section is devoted to recalling the definition of \(k\)-forms, and performing some computations to understanding the induced inner product from the metric tensor on the space of \(1\)-forms and \(2\)-forms. By abuse of notation, we will denote the inner product on \(k\)-forms induced by \(g\) also by \(g(\cdot, \cdot)\). Generally speaking, the inner product on \(k\)-forms can be defined by extending the inner product on \(1\)-forms using the properties of the wedge product.
Review of \(k\)-Forms
Let \(V\) be a vector space and denote \(V^{k} = V \times \cdots \times V\) (\(k\) times). A \(k\)-linear function \(f \colon V^{k} \to \mathbb{R}\) is called alternating if for any permutation \(\sigma\) on \(\{1, 2, \ldots, k\}\), we have that
\[f(v_{\sigma(1)}, \ldots, v_{\sigma(k)}) = \operatorname{sgn}(\sigma) f(v_{1}, \ldots, v_{k}).\]
Then, the following definition specializes the set of alternating \(k\)-linear functions to when \(V = T_{p}M\) for some point \(p \in M\).
Definition 4. Let \(M\) be a smooth manifold and let \(p \in M\). A \(k\)-form at \(p\) is an alternating \(k\)-linear function \(\omega \colon (T_{p}M)^{k} \to \mathbb{R}\). The set of all \(k\)-forms at \(p\) is denoted by \(\Lambda^{k}T_{p}^{*}M\).
There is a lot of nice properties that can be proven about \(k\)-forms, see for instance (Tu 2011). One important property is that if \(\{e_{1}, e_{2}, \ldots, e_{n}\}\) is a basis for an \(n\)-dimensional vector space \(V\), then the set of \(k\)-forms \(\{e_{i_{1}}^{*} \wedge \cdots \wedge e_{i_{k}}^{*} \mid 1 \leq i_{1} < i_{2} < \cdots < i_{k} \leq n\}\) forms a basis for \(\Lambda^{k}V^{*}\), where \(e_{i}^{*}\) is the dual basis element to \(e_{i}\). We will use this for later computations as this enables us to draw heavily from linear algebraic intuition.
The point of the \(k\)-form is they allow us to integrate over \(k\)-dimensional surfaces in \(M\) in a coordinate-free way. We note that the Riemannian volume form defined earlier is an example of an \(n\)-form on \(M\), and the exercise earlier asked to verify that it is well-defined (i.e., coordinate-free).
Lastly, we mention that beyond allowing for integration over \(k\)-dimensional surfaces, the use of \(k\)-forms is crucial in defining operators such as the exterior derivative and the Hodge star operator, which are essential in differential geometry and the study of Riemannian manifolds. We will use these operators in a later post to define the Laplacian on a Riemannian manifold in a coordinate-free way.
Metric Tensor on \(1\)-Forms
To warm-up to the idea of defining an inner product on \(k\)-forms induced by the metric tensor \(g\), we first consider the case of \(1\)-forms. Notice that \(\Lambda^{1}T_{p}M = T_{p}^{*}M\), the dual space of \(T_{p}M\), and because of this association it should be clear how one would define the inner product on \(1\)-forms (hint: consider the natural isomorphism between \(T_{p}M\) and \(T_{p}^{*}M\) induced by \(g\)).
Let \(\omega, \eta \in \Lambda^{1}T_{p}^{*}M\) be two \(1\)-forms at a point \(p \in M\). Denote the isomorphism \(\alpha \colon T_{p}M \to T_{p}^{*}M\) induced by \(g\) be defined by \(\alpha_{g}(v) = g(v, \cdot)\). Then, we can define the inner product on \(1\)-forms by
\[\langle \omega, \eta \rangle = g(\alpha^{-1}(\omega), \alpha^{-1}(\eta)).\]
The idea behind this definition is that we can simply pull back the \(1\)-forms to vectors using the isomorphism induced by \(g\), and then use the inner product on the tangent space itself. However, we can also recover an explicit formula for this inner product in local coordinates.
Let \((x^{1}, x^{2}, \ldots, x^{n})\) be local coordinates around \(p\) and denote the corresponding basis of \(T_{p}M\) by \(\{\partial_{x^{1}}, \partial_{x^{2}}, \ldots, \partial_{x^{n}}\}\) and the dual basis of \(T_{p}^{*}M\) by \(\{dx^{1}, dx^{2}, \ldots, dx^{n}\}\). Then, we can write
\[\omega = \omega_{i} dx^{i}, \quad \eta = \eta_{j} dx^{j},\]
for some coefficients \(\omega_{i}, \eta_{j} \in \mathbb{R}\). By definition of the isomorphism \(\alpha\), we have that
\[\alpha^{-1}(dx^{i}) = g^{ij} \partial_{x^{j}},\]
where \(g^{ij}\) are the components of the inverse matrix of \(g_{ij}\). Thus, we have that
\[\begin{aligned} \langle \omega, \eta \rangle & = g(\alpha^{-1} (\omega), \alpha^{-1}(\eta)) \\ & = g(\omega_{i} \alpha^{-1}(dx^{i}), \eta _{j} \alpha^{-1}(dx^{j})) \\ & = g(\omega_{i} g^{ik} \partial_{x^{k}}, \eta_{j} g^{j \ell} \partial_{x^{\ell}}) \\ & = \omega_{i} \eta_{j} g^{ik} g^{j \ell} g(\partial_{x^{k}}, \partial_{x^{\ell}}) \\ & = \omega_{i} \eta_{j} g^{ik} g^{j \ell} g_{k \ell} \\ & = \omega_{i} \eta_{j} g^{ij}. \end{aligned}\]
Metric Tensor on \(2\)-Forms
General \(k\)-Form Intuition
asdf